OVERVIEW:
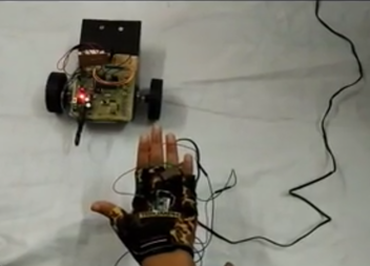
What if a physically handicapped person sits in a chair and can move anywhere just by his hand gesture .Inspired from such an idea we made a small robot model which is moved by the hand gestures of the person.
INSIGHT:
IMU(MPU 6050):
The MPU-6050 is made by Invensense and consists of a MEMS (microelectromechanical system) accelerometer and gyroscope with 16-bit analog-to-digital converters The MPU-6050 has a remarkable innovation called the Digital Motion Processor (DMP) integrated into the chip whose programming is proprietary to Invensense. It allows 6-axis sensor fusion calculations to be performed by the DMP at a fixed rate of 200 Hz and the results delivered to the host microcontroller in the form of a quaternion, Yaw, Pitch, and Roll, tap interrupts, portrait/landscape detection, etc…This information is sent to other devices through I2c bus which is in built in IMU.

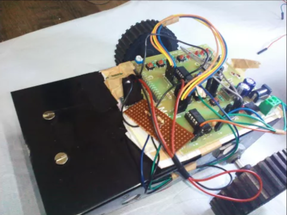
Atmega8:
We used atmega8 to take data from receiverBT-module and run the motors accordingly

Arduino:
We used arduino to get data from IMU and send data to BT-module

BLUETOOTH MODULE(HC-05):
This can act as both master and slave module.Using AT commands we got to set it in any one of the modes .The one on the transmitter side should be inmaster mode and the receiver side should be in slave mode .

WORKING PRINCIPLE:
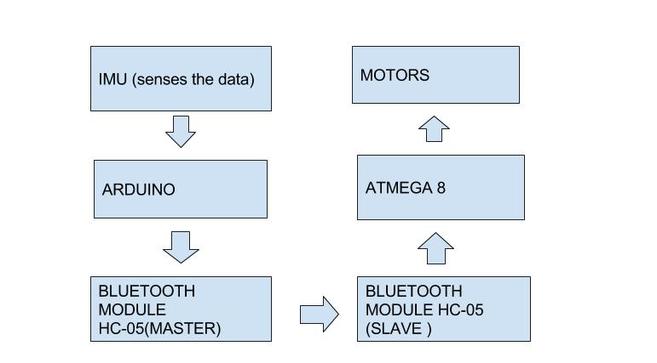
IMU sensor detects the yaw, pitch and roll values of the hand and sends it to the arduino(microcontroller).Based on the difference between these values particular instructions are sent to the receiver side through bluetooth module wirelessly .On receiver side Atmega8 processthe data and controls the motors accordingly .
BLOCK DIAGRAM:
MEDIA
TEAM MEMBERS:
- DIVYA MUSAPETA
- RUPALI GAREWAL
- DISHA KAMALE
- SNEHAL AHIRE