Research papers
IvLabs members have published papers at renowned Journals. We have also presented papers/poster at reputed International Robotics and AI conferences like ICRA, IROS, ROBIO, NeurIPS, etc. This page has sorted all papers in year wise fashion. Click on the year below to know more.
No matching publications.
Try a different search term, or reset filters to see everything.
Patents
Navigation System For A Vehicle And Method for Navigation
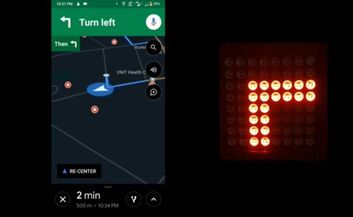
This project aims at developing a navigation system for a vehicle and method for receiving navigation indications during moving condition of a vehicle.
Hybrid Aerial-Terrestrial Snake Robot
A patent secured for a Hybrid Aerial-Terrestrial Robot, designed to operate both on the ground and in the air. This system integrates bio-inspired snake locomotion with aerial capabilities, enabling efficient movement in confined and open environments.
SWAYAT

Swayat is India’s second 3D printed humanoid. It is made for research and to execute human like actions. It participated in FIRA’16 at Beijing
Reconfigurable Bipedal Snake Robot

This paper introduces ReBiS (Reconfigurable Bipedal Snake) robot, a novel modular design mechanism which can quickly transform between various configurations without rearrangement of modules.
Ductor Bot

Air quality inside closed structures, , is generally not questioned. However, researches have shown that the dust inside AC ducts has the potential to cause as much harm as the air pollution outside.
Posters
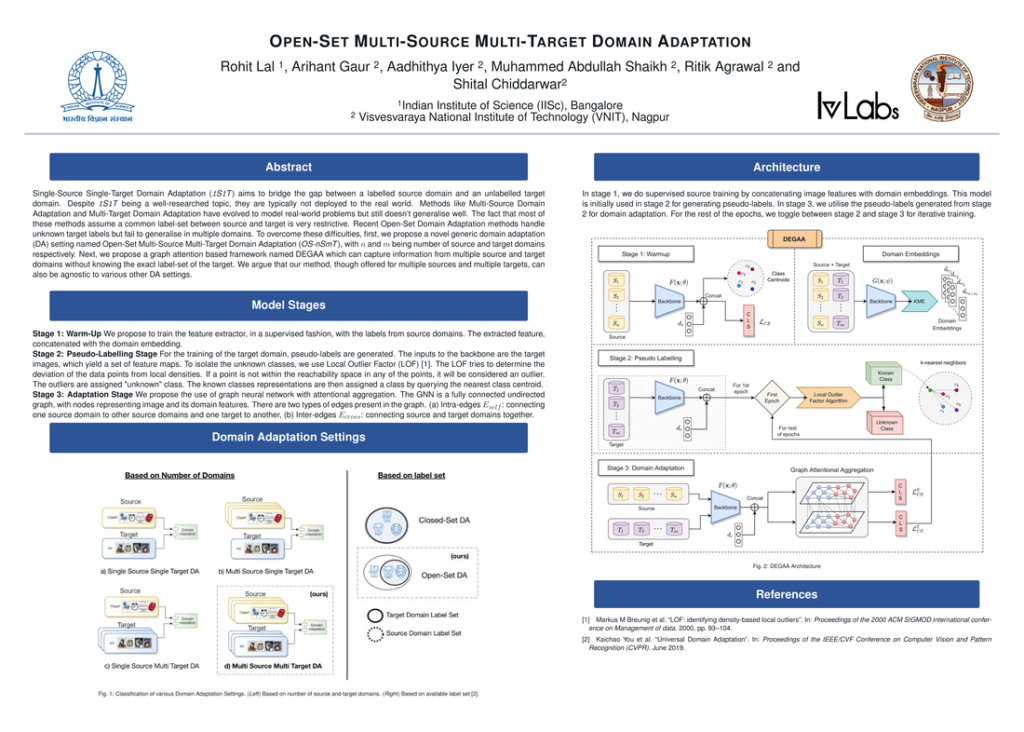
𝗢𝗽𝗲𝗻-𝗦𝗲𝘁 𝗠𝘂𝗹𝘁𝗶-𝗦𝗼𝘂𝗿𝗰𝗲 𝗠𝘂𝗹𝘁𝗶-𝗧𝗮𝗿𝗴𝗲𝘁 𝗗𝗼𝗺𝗮𝗶𝗻 𝗔𝗱𝗮𝗽𝘁𝗮𝘁𝗶𝗼𝗻
Aadhithya Iyer, Arihant Gaur, Muhammed Abdullah Shaikh, Ritik Agrawal, Rohit Lal, and Dr. Shital Chiddarwar
Aims to provide a generic domain adaptation setting named Open Set Multi-Source Multi-Target Domain Adaptation.
NeurIPS-2021, Neural Information Processing Systems, John Hopkins, USA
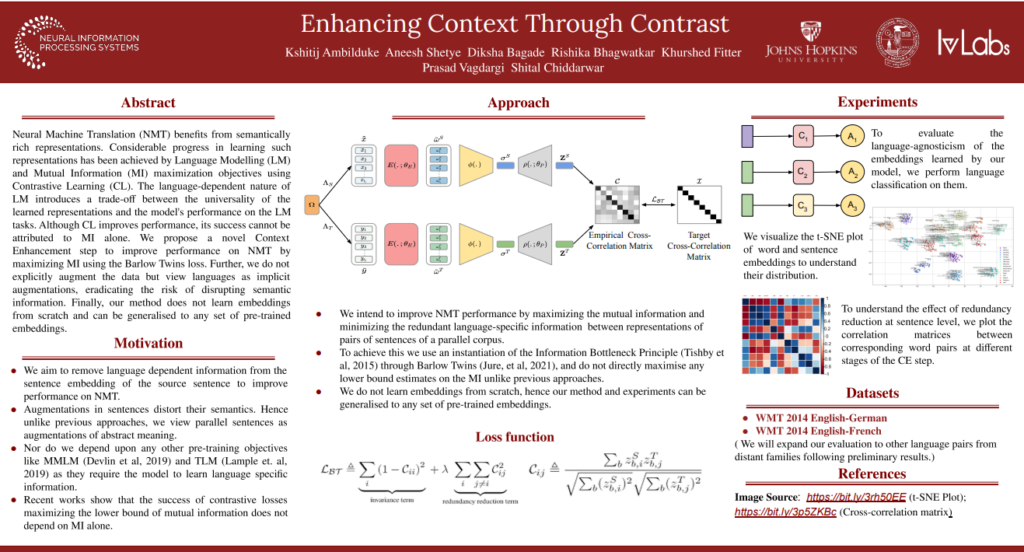
Enhancing Context Through Contrast
Ksitij Ambilduke, Aneesh Shetye, Diksha Bagade, Rishika Bhagwatkar, Khurshed Fitter, Prasad Vagdargi, Dr. Shital Chiddarwar.
Neural Machine Translation by reducing language specific component redundant information.
NeurIPS-2021, Neural Information Processing Systems, John Hopkins, USA
Aims to improve neural machine translation performance by inducing language agnosticism in sentence, and thereby word embeddings.
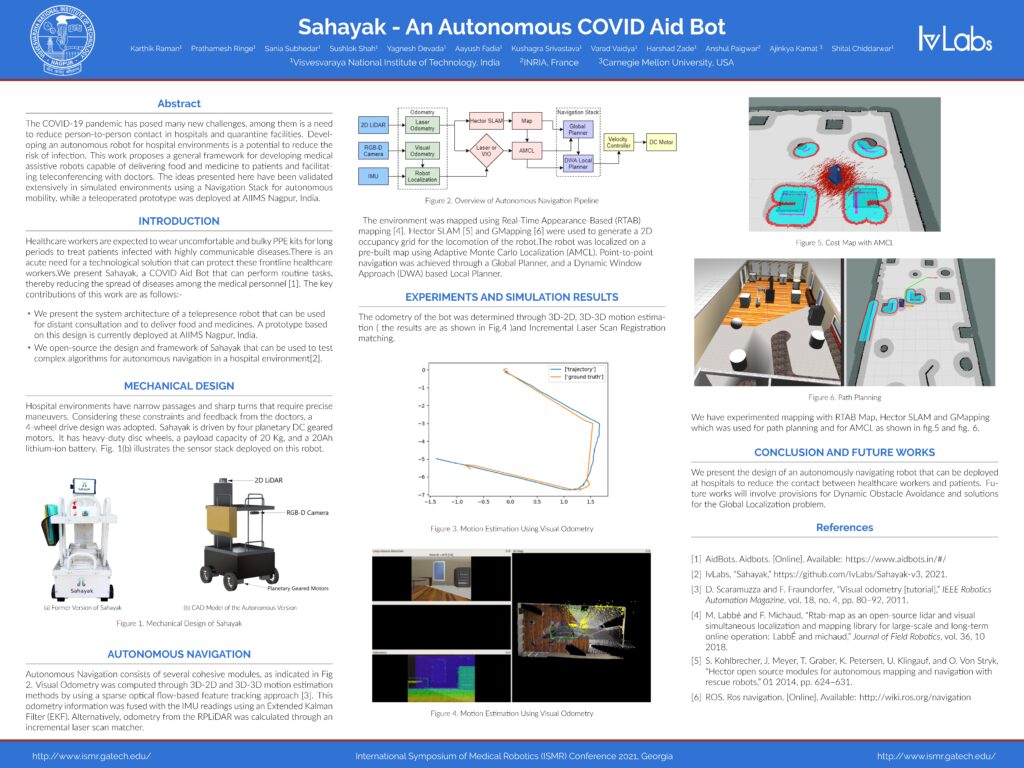
Sahayak – A COVID Aid BOT
Karthik Raman, Prathamesh Ringe, Kushagra Srivastava, Sushlok Shah, Yagnesh Devada, Sania Subhedhar, Varad Vaidya, Aayush Fadia, Anshul Paigwar, Ajinkya Kamat, Harshad Zade, Dr. Shital Chiddarwar.
An autonomous robot capable of assisting frontline workers.
ISMR-2021, International Symposium of Medical Robotics Conference, Georgia, USA.
Aims to provide a platform for autonomous robot to aid medical practitioners.
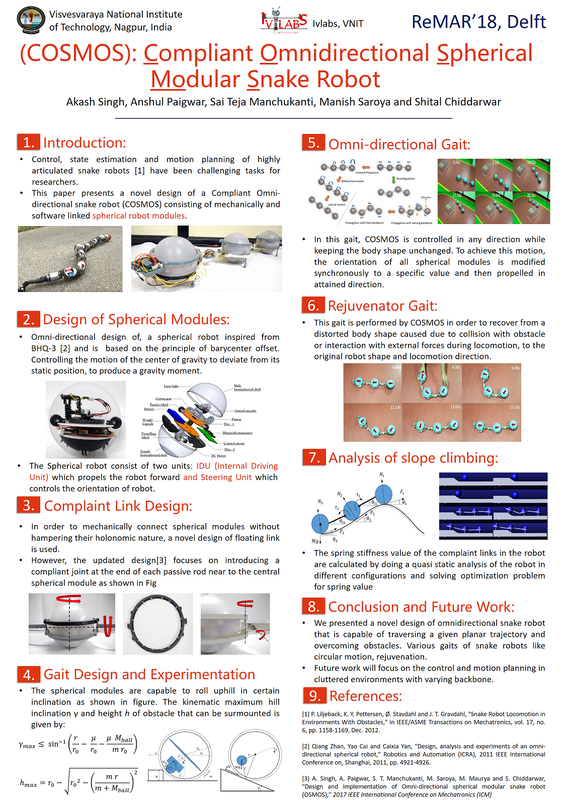
COSMOS – Compliant Omnidirectioal Spherical Modular Snake Robot
Akash Singh, Anshul Paigwar, Sai Teja Manchukanti, Manish Saroya, Shital Chiddarwar
Design for Self Reconfigurable Transformer Robot
ReMAR-2018, IEEE International Conference on Reconfigurable Mechanisms & Robots, Delft, Netherlands
Aims to develop a Snake Robot capable of traversing omni-direction for rescue and search operations.

Modeling and Path planning of Snake Robot in Cluttered Environment
Akash Singh, Chaohui Gong, Anshul Paigwar, Howie Choset
Path planning for snake robots
ReMAR-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia
Aims to model a Snake Robot for path planning in cluttered environment..
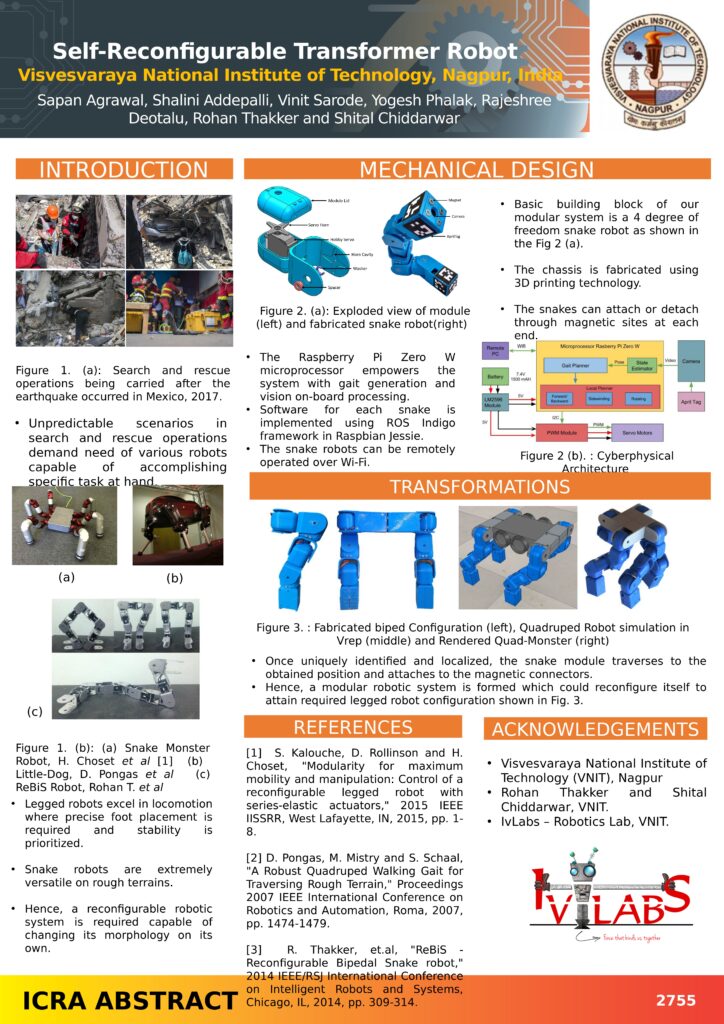
ReBiS – Reconfigurable Bipedal Snake Robot
Sapan Agrawal, Shalini Addepalli, Vinit Sarode, Yogesh Phalak, Rajeshree Deotalu, Rohan Thakker, Shital Chiddarwar.
Design for Self Reconfigurable Transformer Robot
ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia
Aims to develop a Snake Robot capable of reconfiguring by self analysis of surroundings for rescue operations.

OSWalT – Omnidirectional Spherical Wall Traversing Robot
Yogesh Phalak, Sagar Swami, Rajeshree Deotalu, Onkar, Sapan Agrawal, Shital Chiddarwar.
Design for surveillance bot named OSWalT – Omnidirectional Spherical Wall Traversing Robot
ICRA-2018, IEEE International Conference on Robotics and Automation, Brisbane, Australia
Aims to develop a wall climbing Robot which could balance the gravitational force and move close to the surface.
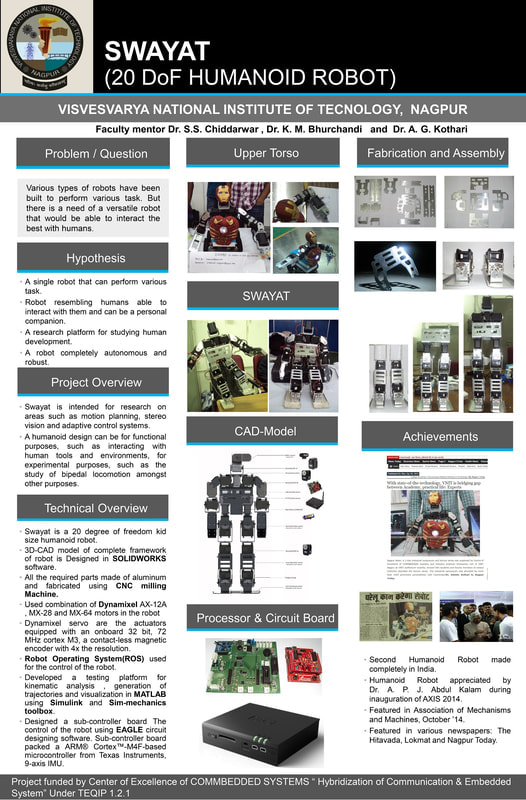

Swayat
Rebis
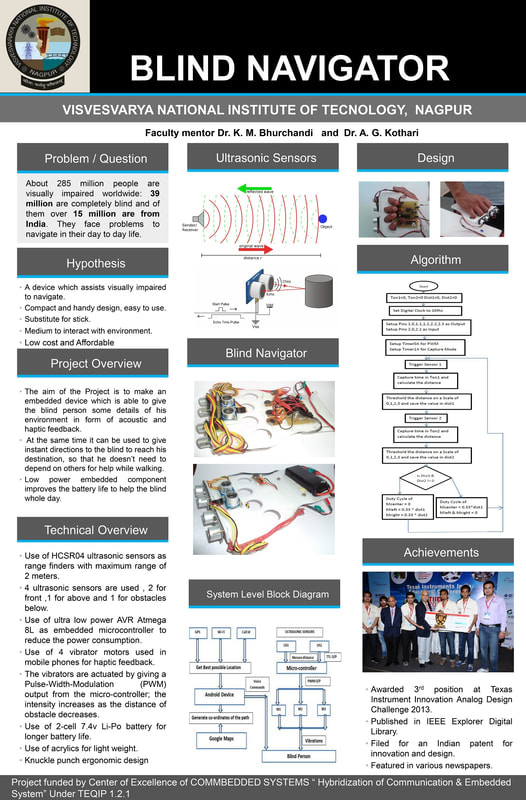
Blind Navigator