Overview
The objective of this project is to design and develop a quadruped robot from scratch, focusing on building a deep understanding of fundamental robotics principles rather than relying on pre-built platforms. The system aims to achieve stable locomotion using a crawl gait by integrating concepts from kinematics, control theory, mechanical design, and embedded systems.
The robot is capable of standing stably and executing controlled walking in a straight line, serving as a foundational platform for advanced legged robotics research.
Approach
The development followed a structured, end-to-end pipeline covering theory, simulation, design, and hardware implementation:
Mathematical Foundation
We began by building a strong base in robotics mathematics and control systems:
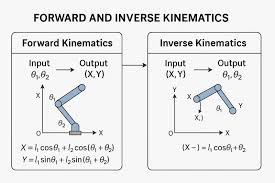
- Forward Kinematics (FK): Determining foot position from joint parameters
- Inverse Kinematics (IK): Computing joint angles for desired foot placement
- Coordinate Transformations: Managing multiple reference frames
Alongside this, control theory concepts were studied:
- System modeling and response analysis
- Laplace transforms
- Stability and response characteristics
- PID control fundamentals
Gait Simulation (MATLAB)
Using the developed kinematic models, gait patterns were simulated in MATLAB:
- Defined foot trajectories in Cartesian space
- Converted trajectories to joint angles using IK
- Implemented timing sequences for a crawl gait
- Ensured static stability and smooth joint transitions
This phase validated design feasibility before hardware implementation.
Mechanical Design
The robot was fully designed in Autodesk Fusion 360, focusing on performance and practicality:
- Complete quadruped structure modeled from scratch
- Use of linear actuation in lower legs to reduce servo torque load
- Compact body design housing:
- Battery
- Arduino Uno
- PCA9685 driver
- Internal wire routing for improved safety and aesthetics
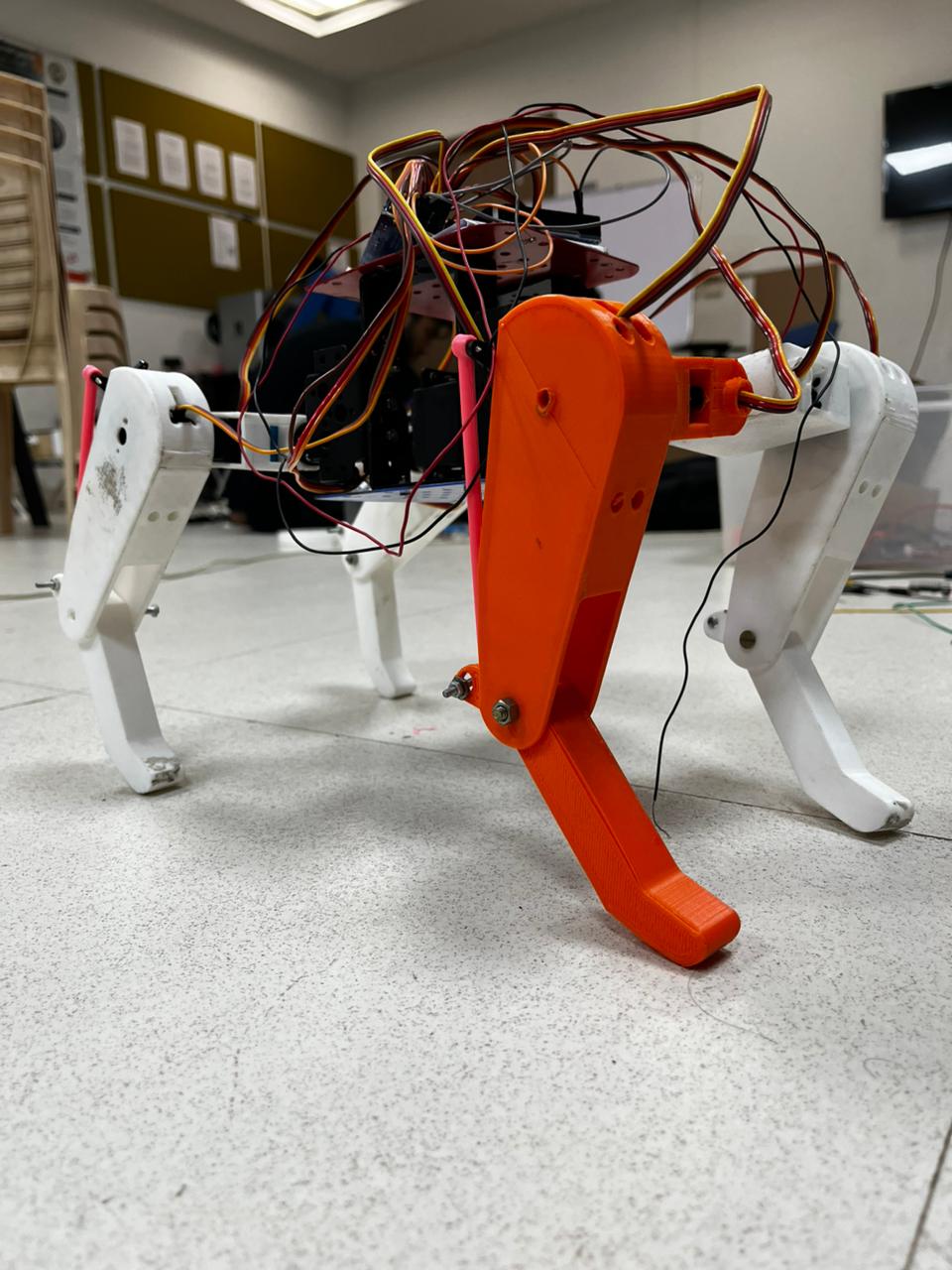
Fabrication & Assembly
All components were 3D printed using PLA and assembled carefully:
- MG995 servo motors for actuation
- Ensured:
- Proper alignment
- Smooth joint motion
- Structural rigidity
Embedded Implementation
Control algorithms from simulation were deployed on hardware:
- Arduino-based control system
- PCA9685 for multi-servo coordination
- Real-time execution of crawl gait
- Iterative tuning for stable locomotion
Key Modules
Kinematics & Motion Module
This module defines and controls the robot’s leg movement:
- Computes joint angles using Inverse Kinematics
- Generates smooth foot trajectories
- Maintains continuity and avoids singularities
Gait & Control Module
Responsible for coordinated locomotion:
- Implements crawl gait sequencing
- Ensures static stability during motion
- Synchronizes leg movements for smooth walking
Mechanical & Hardware Module
Handles physical structure and electronics:
- Designed in Fusion 360 for strength and compactness
- Internalized wiring system
- Integrated electronics:
- Arduino Uno
- PCA9685
- Servo array
Summary
The quadruped operates by generating predefined foot trajectories, which are converted into joint angles using Inverse Kinematics. These commands are executed through servo motors controlled by an Arduino-based system.
The coordinated motion of all four legs enables the robot to maintain balance while executing a crawl gait, resulting in stable and controlled locomotion.
Team Members
- Roshan Kumar Singh
- Tanmay Urade
- Adwait Vikram Singh Rathore
Mentors
- Aniket Kumar Singh
- Ayush Kumar
- Pakki Dharani Bharadwaj
- Harshal Kolhe