Overview
Multirobot systems offer flexibility, sensor coverage which makes them attractive for task such as surveillance, rescue, and warehouse automation. One of the foundational problems for multirobot systems is finding safe, collision free paths that takes robots to configurations at which they can perform tasks, which is termed the multi robot path planning problem.
Insight
Principle
To solve this problem, the whole workspace was divided into several polygonal controllers. Now there exists Path Planner algorithm which tells us polygonal controller should be executed after a particular polygonal controller. This will lead to execution of controllers in a chain, which act as a path for the robot to reach its goal position. The design of the controller should be such that it provide smooth velocity vectors which reduces the cost of travel and also smoothen the path on which the robot has to travel.
Triangular Controller
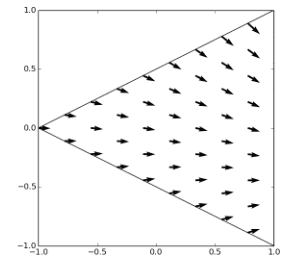
The arrows shows the velocity vector field inside a polygon which the robot will follow. There is always one exit facet for every polygon and from other facet of polygon the robot should enter only. This field is more center pointing which helps the robot to be in domain of the controller. The robot leaves the controller from the midpoint of the exit facet (This is good for the robot). The optimization criteria is first go towards the center of the controller then move towards the exit facet.
Square Controller
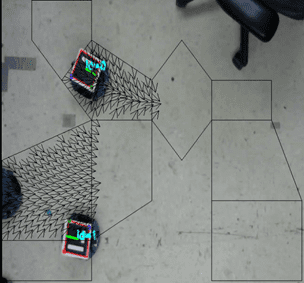
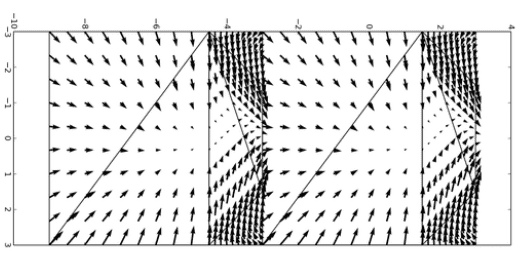
Figure shows two triangulated square controllers which will be executed one after another to achieve certain task. You can see that the corner of the exit facet of the controller is chopped off and a new triangular controller is inserted over there. These newly added controller push the robot firstly towards the center and the towards the exit facet. So finally the arena can be divided into grid of square or triangles whose velocity field we have obtain. In the video we have taken random polygons just for the demonstration that it works for every polygon.
Author
Manish Saroya
Description
This research was the part of research internship done by the author at Bio-robotics lab, RI Carnegie Mellon University.