Overview

The aim is to develop a drone which is capable of delivering a package of 500 gm autonomously from point A to B
Control Flow
- Drone receives GPS coordinates of destination via Android app or Web application.
- It autonomously flies to the destination.
- It loiters over the destination looking for an AprilTag (visual marker only provided to customer).
- Once AprilTag is detected, drone lands on it and drops the package.
- After dropping the package, drone takes off again and returns to the launch position
Hardware
- Used a custom built quadcopter which uses an mRo Pixhawk flight controller alongwith ODroid XU4 as the companion computer. The ODroid runs Ubuntu Mate 16.04 and uses the MAVROS package on ROS Kinetic to communicate with the Pixhawk and to send commands to it.
- Some parts which were required like casing for ODroid, parts of the landing gear, etc. were designed in SolidWorks and 3D printed using ABS material.
- Used the Tarot IronMan 650 frame, T-Motor Antigravity 4006 Brushless Motors, Hobbywing XRotor 40A ESCs and Tarot 1555 High Strength Plastic Propellers.
- Designed a box which holds the package to be dropped and also houses the main 24V Li-Po battery and a fail-safe GPS tracker.
Cyber-Physical Architecture
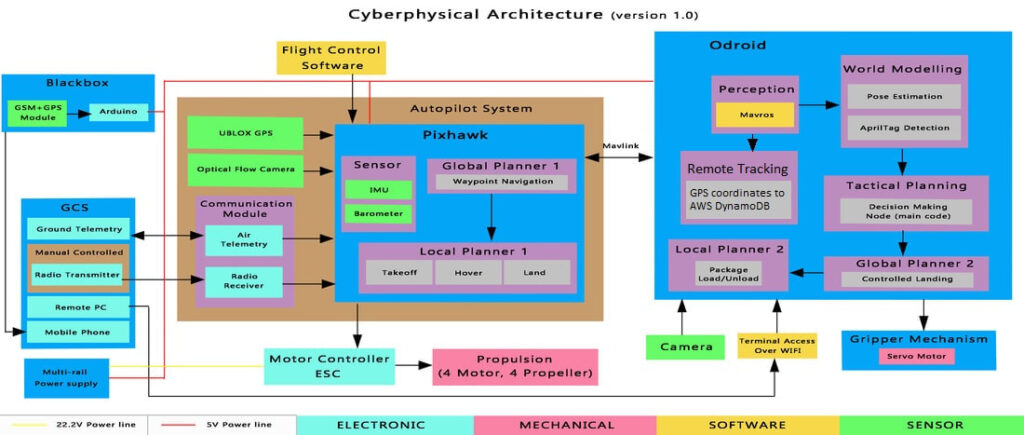
For more info on off-board control of drone and simulation, refer this site.
Progress :
- Achieved delivery from A to B without obstacles in simulation and on hardware.
- Implemented real-time tracking of drone by uploading GPS coordinates to AWS database in simulation.
- Currently working on implementing real-time tracking on hardware.
Working Video
Team
- Shubhanshu Gupta
- Pranay Pourkar
- Vedant Ranade
- Anish Gupta
- Aditya Bastapure
- Akshay Kulkarni
- Amit Balki
- Rahul