Overview

This project aims to develop an hexapod robot capable of omnidirectional locomotion and obstacle climbing.
Hardware Specifications
Body Architecture
The hexapod robot features a circular base with legs placed in a radially symmetrical configuration for enhanced stability and maneuverability.

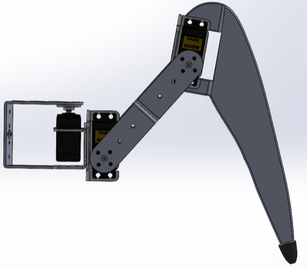
Leg Structure
The hexapod’s legs have three degrees of freedom (DoF) to control forward/backward motion and height independently, allowing for versatile locomotion.
For joints and actuators, high-torque MG996R servo motors are used for actuation, with servo mounts serving as joints. The motors are distributed among the coxa, femur, and tibia sections.
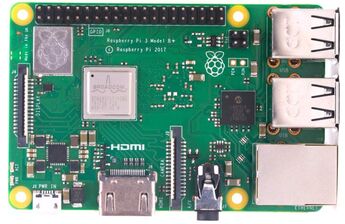
Electronics
The robot is powered by a Raspberry Pi 3b+ microcontroller, offering computational power for real-time trajectory generation. PCA9685 motor drivers control the servos, and a high-current 5V power supply ensures sufficient power.
Software Specifications
Leg Kinematics
Inverse kinematics calculations are employed to determine joint angles (l1, l2, and l3) needed to achieve a desired end effector position and orientation for the robot’s legs.


Trajectory Generator: The robot follows a predefined trajectory with phases and repeats the cycle consisting of lift-off, swing, touchdown, and stance for each leg during locomotion.
Gait Planning: A tripod gait is implemented, providing a balance between speed and stability for the hexapod.