Overview
As children, we’ve all solved mazes. People are captivated by mazes. Let’s have a look at how a robot, equipped with a LiDAR sensor, solves a maze without having any prior knowledge of the environment. Our project’s primary objective is to use the Robot Operating System (ROS) to simulate a robot solving a maze in a gazebo environment. The robot is completely unaware of the maze’s surroundings.
Approach
| This project was completed in three steps:Motion control of SAHAYAK Bot.Using the wall following algorithm on a single wall.Solving the Maze environment. The Sahayak bot is controlled by delivering velocity to the joint velocity controllers, which direct the speed of the Sahayak wheels. The Sahayak bot was made to follow a wall from both sides and avoid any collisions while taking a turn by applying conditions to the joint velocity controllers using distance data gathered from the LiDAR sensor over a 180-degree span. The LiDAR sensor sends laser beams and uses the time it takes for them to return to compute the distance to the object.We used a simply connected maze in this project. A simply connected maze does not have detached walls or loops. The Wall Following Algorithm was used to solve the maze environment. The Sahayak bot was tested for various velocities to avoid collisions with the walls while testing the wall following algorithm which followed the left wall of the simply connected maze, thus solving the maze environment.This algorithm does not provide the optimal solution. |  A simply connected maze A simply connected maze LiDAR Sensor LiDAR Sensor |
Results
Motion control of Sahayak Bot
Wall following algorithm on a single wall
Solving the maze environment
Tools and Libraries used

python


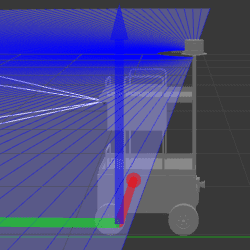
SAHAYAK BOT MOUNTED WITH A LiDAR SENSOR
Team
| Members: Smit Gala Malhar Limaye Madhav Ishwar Laeba Sayed Jyoti Thakur | Mentors:Sania Subhedar Karthik RamanPrathamesh RingeYagnesh DevadaSushlok Shah |