Control, motion estimation, and planning of highly articulated snake robots have been challenging tasks for researchers. Even traversal on
simple flat trajectory requires complex models of planar snake robot locomotion.This paper presents a novel design of an
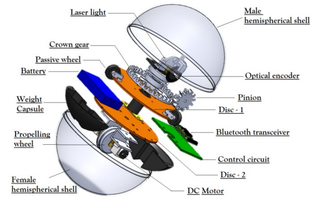
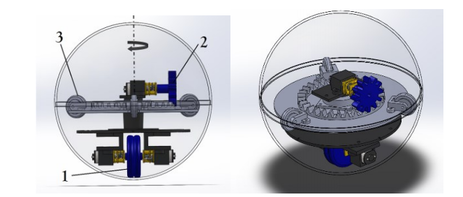
Omni-Directional Spherical Modular Snake Robot (OSMOS) consisting of mechanically and software linked spherical robot modules. This new design eliminates the problems of planar snake robots to handle versatile motions with complex gait analysis, by leveraging Omni-directional motion capabilities of spherical robots.
Work published as: Design and Implementation of Omni-Directional Spherical Modular Snake Robot (OSMOS)