Overview
As the perspective of technology tends to make human life easier and safer a vital contribution still remains in the field of upper limb prosthetics. In view of these aspects the students at IvLabs developed an 6DOF robotic hand as a cost-efficient replacement to existing Prosthetic hands yet retaining the functionality of human hand.
Working Principle
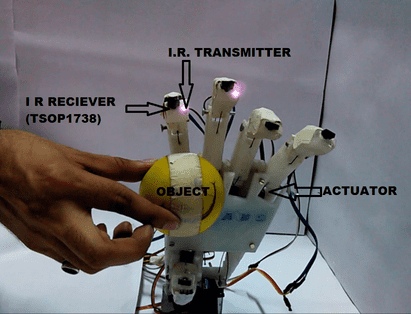
Each finger has an individual motor to move independently replicating HUMAN HAND. The fingers are under-actuated with their Actuation driven by high torque mini servo actuators through tendons as non-linear parameters. The thumb also has roll motion at its base, which is the 6th degree of freedom for the system. TSOP1738 receivers are simple proximity sensors that trigger upon receiving an infrared wave transmitted with suitable luminous intensity. Both Transmitters and receivers are placed at fingertips and as an object is sensed closer than 1.5 cm the actuators get triggered, hence the number of fingers to be used for gripping is decided without using EEG/EMG techniques.
Mechanical Design
Designing and Modelling of system parameters like fingers and base palm were done in Solidworks. The performance of the hand was evaluated based on the simulations for each finger. Based on these aspects experiments and iterations were performed and the design was finalized. The complete hand structure was fabricated using 3D printing using PET plastic material.
Electronic Controls
The sub-controller circuit is based on the ARM CORTEX M4-32-bit processor, which links the sensors and actuators. It includes the power circuitry for sensors, actuators, and output LEDs and the protection circuit from external SMPS power supply.
Features
| ROBUST BUILD | The material used is light weight having good strength with a stable mechanical structure. |
| COST EFFICIENT | Manufacturing of complex mechanical design made easy using 3D printing and thus lower in cost. |
| CUSTOMISABLE DESIGN | Customizable design made using interchangeable parts. |
| OBJECT ORIENTED GRIPPING TASKS | Power grasp, Column grasp, Tripod grasp, Precision closed grasp, Precision open grasp, Hook grasp, Trigger grasp, Pinch relaxed hand. |
| VIRTUAL VISION | Complex EEG, EMG features are provided through the proximity vision sensors at the fingertips. |
Tech Specs
| WEIGHT | 400 Grams |
| DIMENSIONS | 26cm x 11cm x 5.8cm |
| ACTUATOR | HS82MG mini servo torque 3.4kgcm @ 6V |
| DEGREES OF FREEDOM | 6 DOF |
| PROCESSOR | CARM-CORTEX TIVA C series TM4C123GH6PM microcontroller. Code composer studio |
| SENSORS | TSOP 1738 Infrared receiver Infrared transmitter (940 nm wavelength) |
| FABRICATION | Done by Cost efficient 3D printing |
Media