A MECHANICAL ROBOT….
OVERVIEW
Our Robotics industry is mainly focused on making wheeled robots but the main problem with the wheel mechanism is that it has got limitations of transversing on different terrains.
This problem can be overcome by introducing new type of mechanism inspired from biological designs of animals.
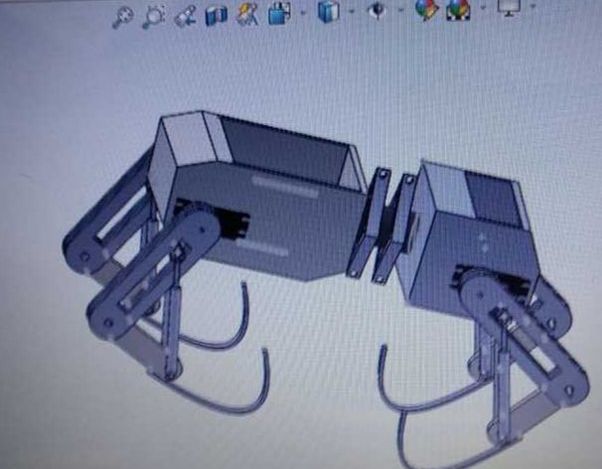
Project Quadruped mainly focuses on making a mechanism of walking by observing motion of animals around.
This type of motion helps us to achieve advantages over the traditional wheeled robots and a giving a futuristic approach.
COMPONENTS USED

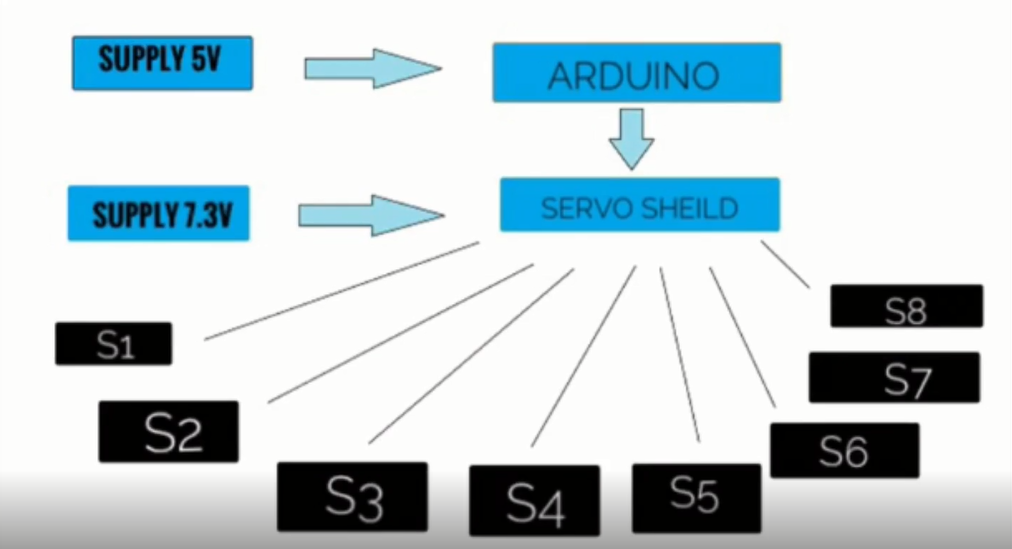
1. ARDUINO UNO
A Microcontroller which helps to coordinate 8 servos used in the robot according to the their movement required.
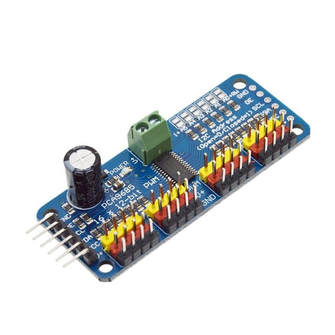
2.SERVO SHIELD
A servo driver on which 8 servos are connected. Its basically used as it provides external power to servos as there is insufficient power provided by Arduino.

3.BUCK CONVERTER
A Device used to step down voltage and provide more current required for driving servos. Another reason for using it is to step down 7.4V battery to 5V as Servo shield works on 5V.

4.Two 7.4 volt LITHIUM ION Battery
1st one for providing Arduino supply & 2nd one for Servo shield.
COMPLETE CIRCUIT REPRESENTATION
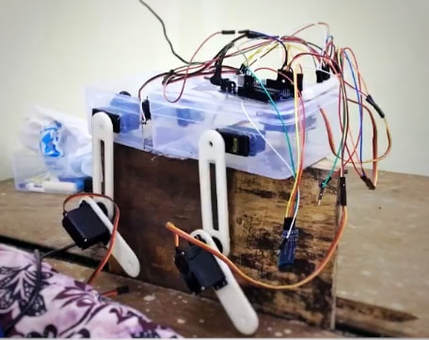
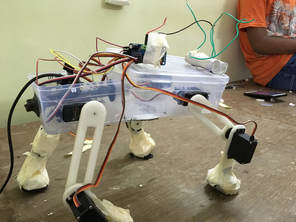
IMAGES OF BOT
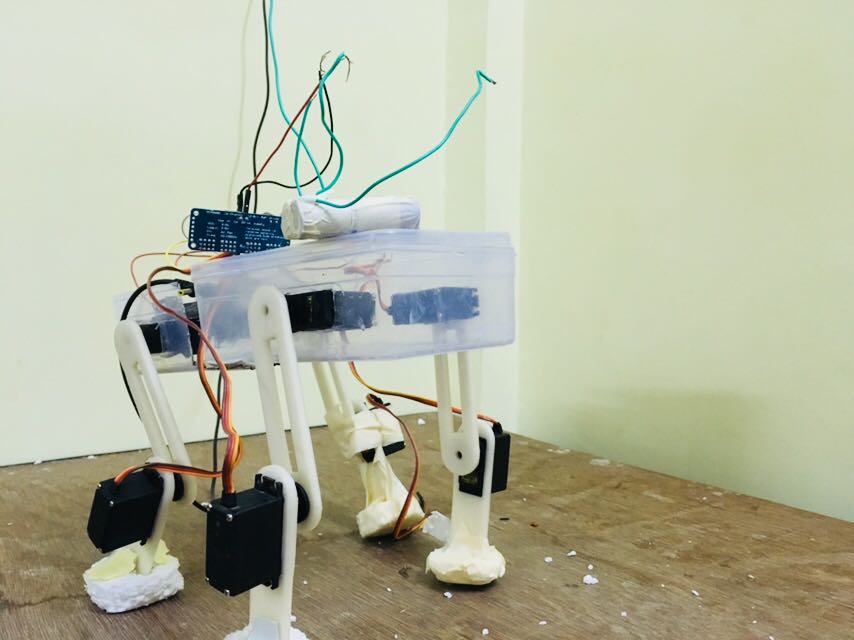
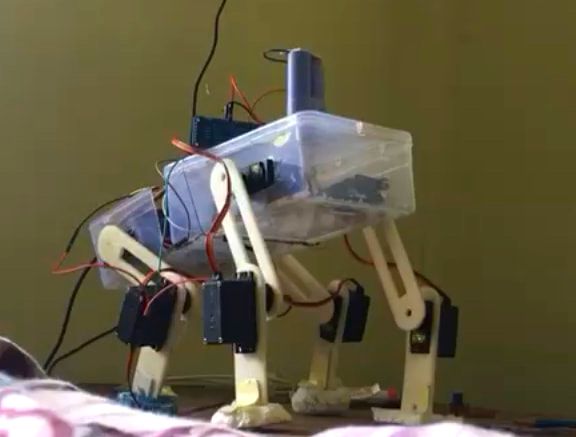
SNAPS!!
OUR TEAM
- APURV GAIKWAD
- SANJANA NAGPURE
- YASH NAGRE
- AAKARSH GOEL
- NIRAJ THOTE
OUR MENTORS
- UNMESH PATIL
- RAJESHREE DEOTALU
- LOKESH MALKE
- RADHIKA TEKADE