Introduction
Medical personnel regularly put themselves at risk of infection to protect patients, a fact that everyone has been acutely aware of during the COVID-19 pandemic. Development of an autonomous robot for hospital environment aiming to reduce the risk of the health care workers at their work has exponentially increased in the ongoing pandemic. Sahayak, a COVID aid bot that is capable of navigating autonomously in simulated static environments. The aim is to provide a general framework for developing medical assistive robots. A prototype of Sahayak was successfully deployed at AIIMS Nagpur.
Mechanical Design
- To enable smooth motion, a 4-wheel drive design was adopted. Sahayak has a payload capacity of 20 Kg and is driven by four planetary DC geared motors.
- It also includes heavy-duty disc wheels and 20Ah lithium-ion battery to power the motors.
- The prototype of Sahayak included a Jetson Nano for computation.
- A A2M8 2D LiDAR and an Intel RealSense R200 was mounted on the model.
Previous Work
Sahayak v1:
- Sahayak v1 started as a simple 4 wheel drive which was teleoperated using a remote control
Sahayak v2:
- The new version had improved motors, ability to carry over 20kg payload and other facilities such as Video Conferencing.
- It was successfully deployed at AIIMS Nagpur.

Pipeline Overview
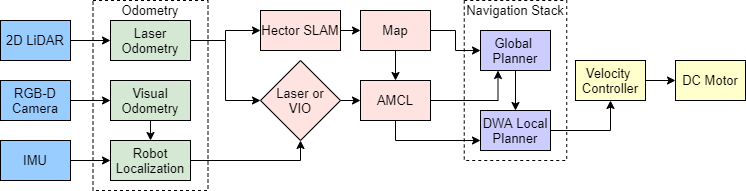
Pipeline
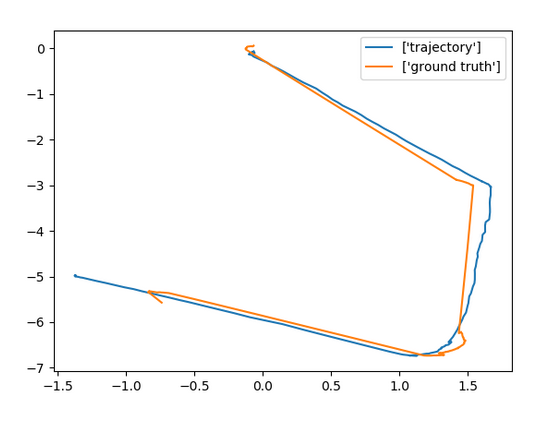
Visual Odometry
- Visual Odometry was computed through 3D-2D and 3D-3D motion estimation methods by using a sparse optical flow-based feature tracking approach.
- This odometry information was fused with the IMU readings using an Extended Kalman Filter (EKF).
Visual Odometry
Mapping was done in 2 ways
- 3D mapping done using RTAB mapping
- 2D mapping was done using Hector SLAM and GMapping packages.
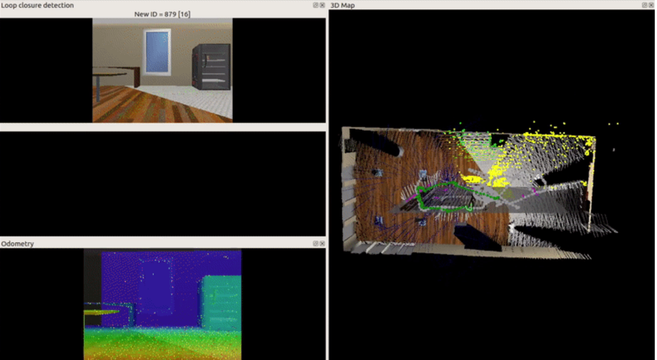
Real-Time Appearance-Based mapping
- As 3D localization and Motion planning was not required 2D grid map was required
- Dijkstras Algorithm was used as Global Planner
- Dynamic Window Approach (DWA) planner was used as Local Planner.
- This came bundled in Nav Stack

Motion Planning Using Nav-Stack
Team
- Karthik Raman
- Prathamesh RInge
- Sania Subhedar
- Sushlok Shah
- Yagnesh Devada
- Aayush Fadia
- Kushagra Srivastva
- Varad Vaidya
- Harshad Zade
- Anshul Paigwar
- Ajinkya Kamat
Faculty Mentors:
Dr. Shital S. Chiddarwar