Overview
Control system is designed to stabilize the camera gimbal system used in different airborne systems for applications such as target tracking, surveillance, aerial photography, autonomous navigation and so on. The technique is applied in everything from self-stabilizing cameras to helicopters and noise reducing equipment.
This camera gimbal system replaces many traditional tracking systems such as radar which are heavy and large to mount on air vehicles. So, the stabilization of camera gimbal is very important to eliminate shakes and vibrations in photography, provides accuracy in tracking moving target and so on.
Mechanical Aspect
1) DIMENSIONS:
Height: 30 cm
Breadth: 13 cm
Length: 15 cm
Weight: 486 gm
2) MATERIAL USED: Acrylonitrile, Butadiene, and Styrene(ABS) for 3-D printed parts, Aluminium base
3) MOTORS: TowerPro MG995 Servo (Torque 9.4 kg-cm)
4)MECHANICAL COMPONENTS: Nut and Bolts
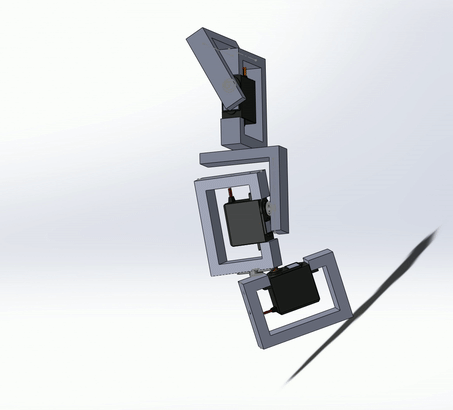
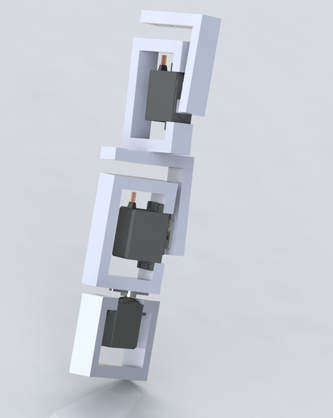
Designed in Solidworks
The model was first designed in solidworks(2017 version). The final design is below.
Circuit Diagram
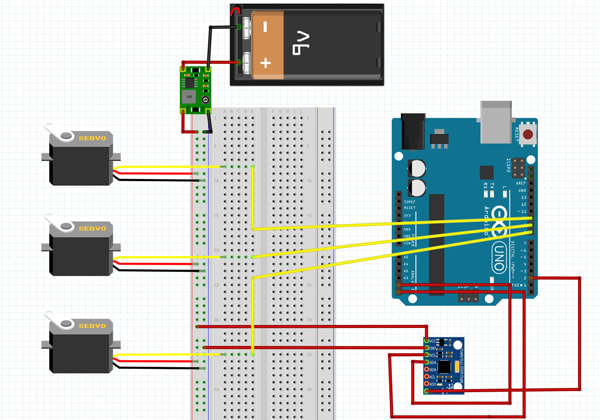
ELECTRONIC ASPECT
Controller: Arduino UNO
IMU SENSOR: MPU6050(Accelerometer + Gyro)
Electronic Component: LM2596 DC- DC Buck converter step down module
Board: Prototype Board
Adapter: AC/DC Adapter(12 volt)
MEDIA
Application
It can be used at many places making it a very useful device
Aerial photography
Can stabilize video footage and reduce shaky effect

Surveillance
Can be used to monitor suspicious activity
Target tracking
It can lock down a particular target and keep it in vision
Meet Our Team:
- Rohit Lal
- Amrapali Khandare
- Mohammad Saad
- Sijjy Chaurasia
- Himanshu Patil
Mentored by:
- Rajeshree Deotalu
- Rahul
- Radhika Tekade