Overview
- Stereo reconstruction is the concept of realization of depth from a pair of stereo images. Extracting 3D information from the stereo pair of images.Stereo images are two images of the same object such that they have parallel or slightly verged image planes.
Abstract
- The general idea of the Stereo Reconstruction algorithm which reconstructs depth information form two camera views also known as stereo view.
- A stereo pair of image contains two views of a scene sided by side, One of the views is intended for the left eye and the other for the right eye.
- Creating Depth from the pair of stereo images by using the relation between disparity and depth. Reconstructed a dense 3D view from the depth map.
To obtain 3D Reconstructed Image
- Two Stereo images are used to obtain a ‘Disparity map’, which is used to map pixel shift between the two stereo images. The disparity map is obtained through the StereoSGBM (Semi Global Block Matching) algorithm performs three important steps such as prefilter image to normalize brightness, search correspondence along the horizontal epipolar lines using a SAD window and eliminates bad correspondence matches.
- Depth i.e. the distance of any point from the frame can be estimated by applying Stereo Geometry over the Disparity map.
- The output can be visualized in the PLY file format using a 3d modeling software Meshlab.
Relation between Disparity and DepthDisparity refers to the apparent pixel difference between pair of stereo images. Suppose you are holding an object at a distance X from the center of distance between both eyes and now you just close and open each eye simultaneously, you will observe that there is a significant jump of the position of that object. Now increase the Distance to 2X and repeat the process of closing and opening each eye simultaneously and you will observe that the object will move a little bit and there is no significant change of position. Object which are closer will appear to jump a significant distance and objects which are far will move a little bit. Depth is inversely proportional to disparity( pixel difference between two views seen from each eye).
Applications
It is used in industrial automation and 3D machine vision applications to perform tasks such as volume measurement, automotive part measurement and 3D object location ,finding depth in the environment is the important concept in the working of Self Driving cars.
Concepts used
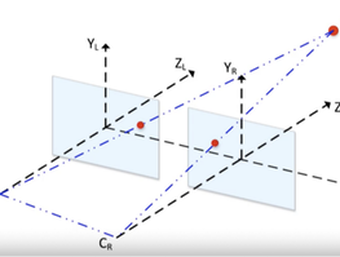
Camera planes and their inter-relationship

Stereo Pair
Results
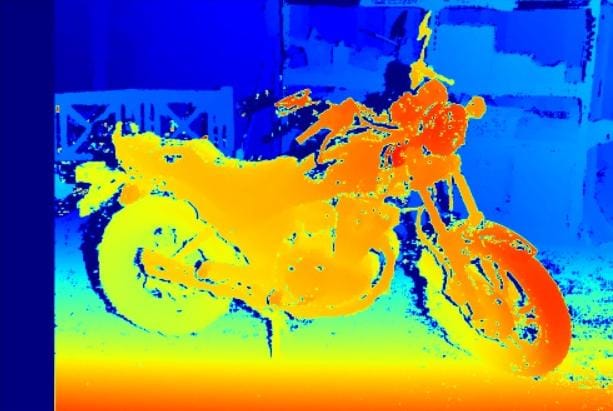
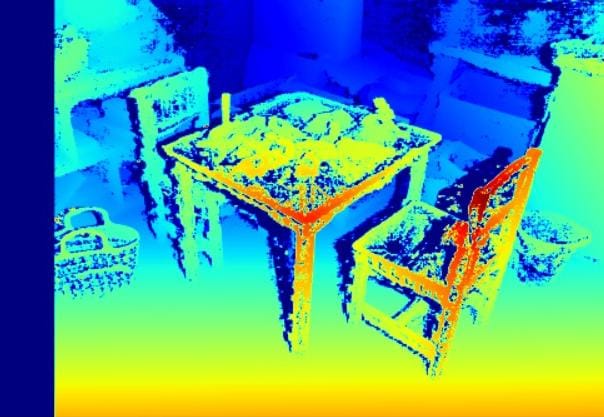

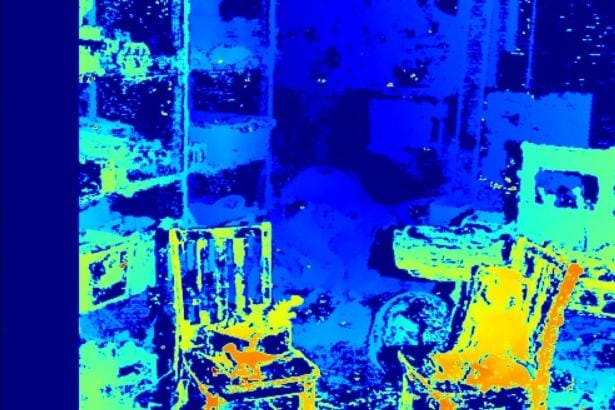

Depth Map

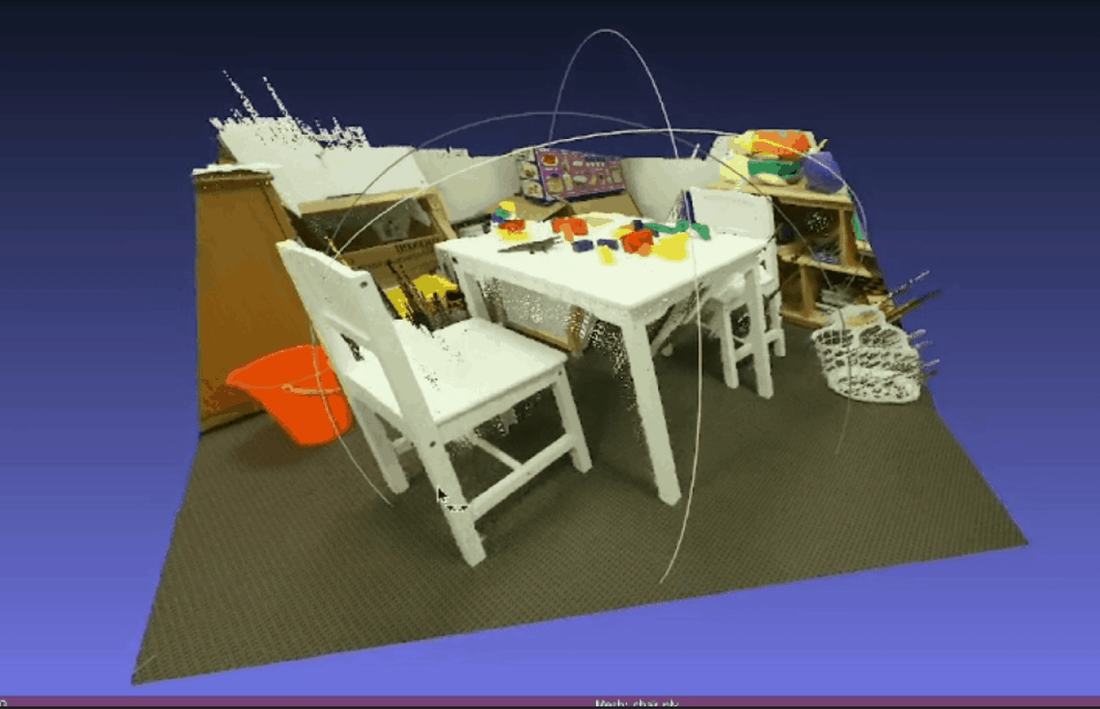
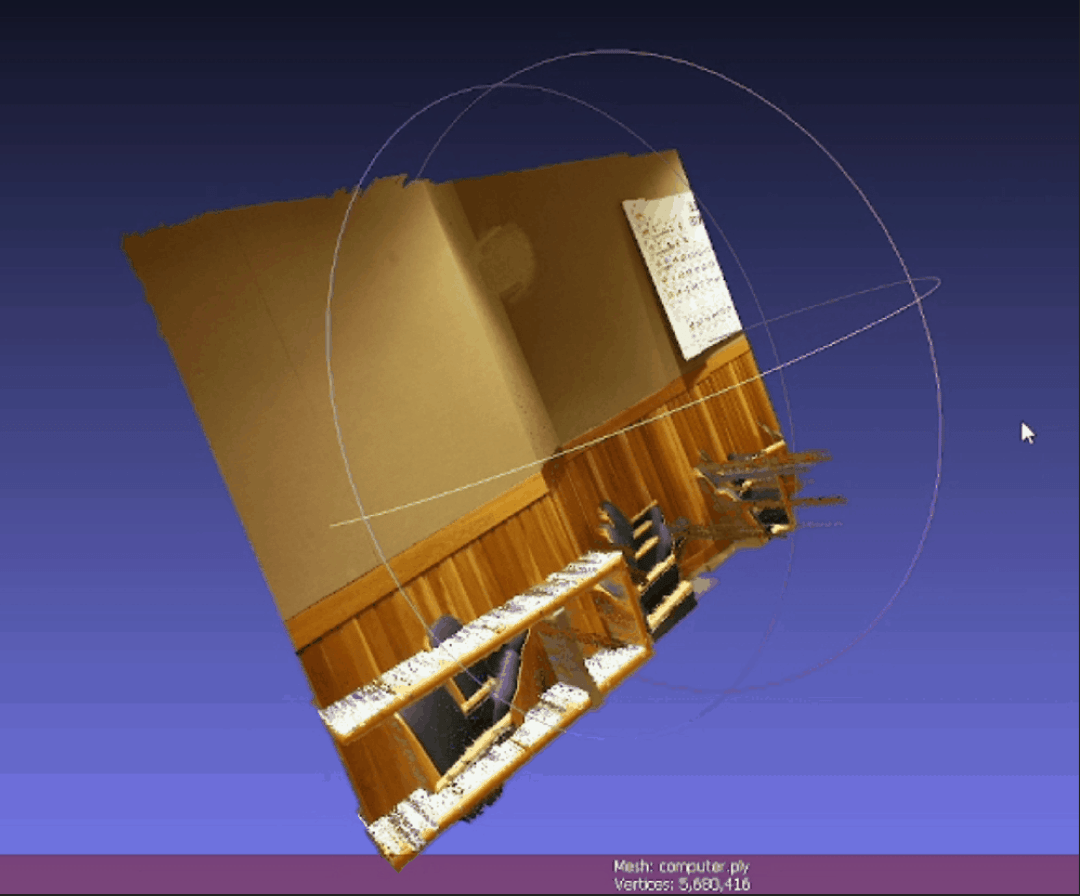

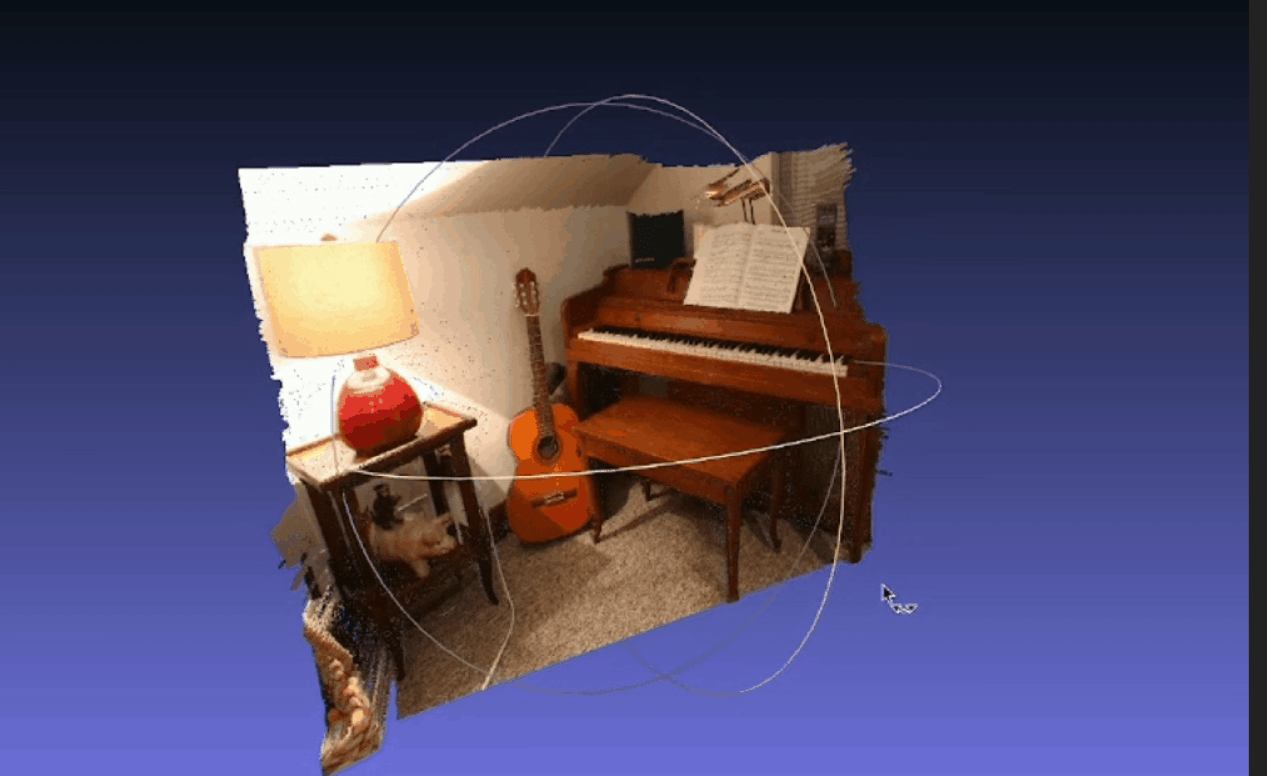
Reconstructed ImagesGitHub Repository
Tools and Libraries used

python



Meshlab
Our Team
| Members Pranav MailarpawarGonna YashwanthAniket Turkel | Mentors 1. Sushlok Shah 2. Bipasha Parui 3. Parees Pathak 4. Karthik Raman |