Overview
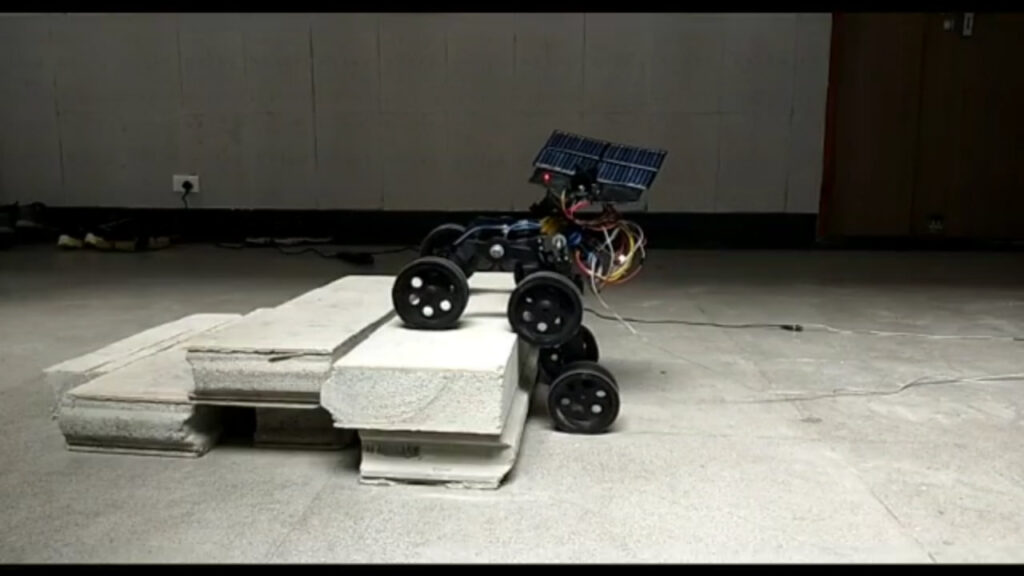
Main objective of our project is to make an all-terrain robot with a sun tracking mechanism on it.
The bot can traverse all kinds of terrain, climb steps up to 15 cm’s high and can withstand a gradient of about 45 degrees.
The Sun-Tracker must always point towards the sun to absorb maximum solar energy at any given time.
The tapped solar energy charges a battery that runs the robot.
Hardware Used
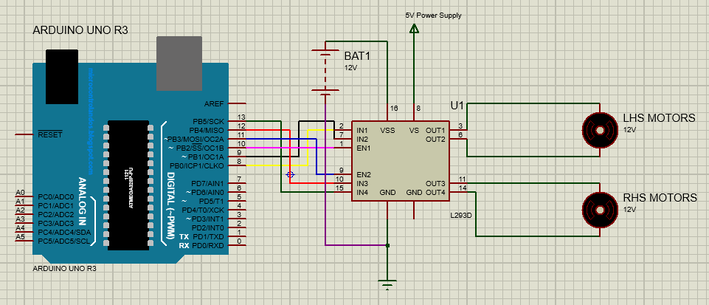
- Arduino UNO
- HC-05 Bluetooth Module
- L298N Motor Driver
- MG90S Servo Motors x2
- 30 rpm DC motors x6
- Bevel gears x3
- 3D Printed Parts
- Jumper Cables
- Li-Po Battery 12V
- Solar Panels
- LDR x4




Software Used
Arduino IDE

Dassault Systemes Solidworks

Proteus Design Suite
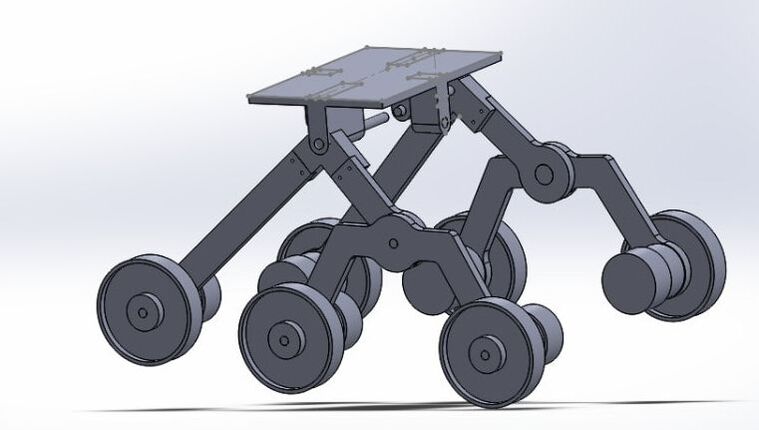
Solidworks Assembly
Circuit For Rocker-Bogie
Codes Used
- Visit our GitHub page for all codes and 3D printed parts details.
Features
Solar panels always remain perpendicular to sun rays to maximise solar energy absorbed at any given time.
Rocker-Bogie base is able to traverse all kind of uneven terrain.
Base is easily able to climb steep slope of about 45 deg.
It is also capable of climbing platforms up to 15 cms in height.
Bot can be moved in all directions and at every speed possible with help of joystick app.
Video Illustration
http://www.youtube.com/embed/CTdRMOJmFSw?wmode=opaque
CREDITS
Team Members
- Aditya Wadichar
- Shruti Murarka
- Abhijit Rehpade
- Shravar Tanawde
- Dhruv Agrawal
Team Mentors
- Mohammad Saad
- Sharan Bajjuri