Overview

Ever imagined a hand which can write your name !!And which can grab things like we humans do!! The Robotic Arm is all what you need
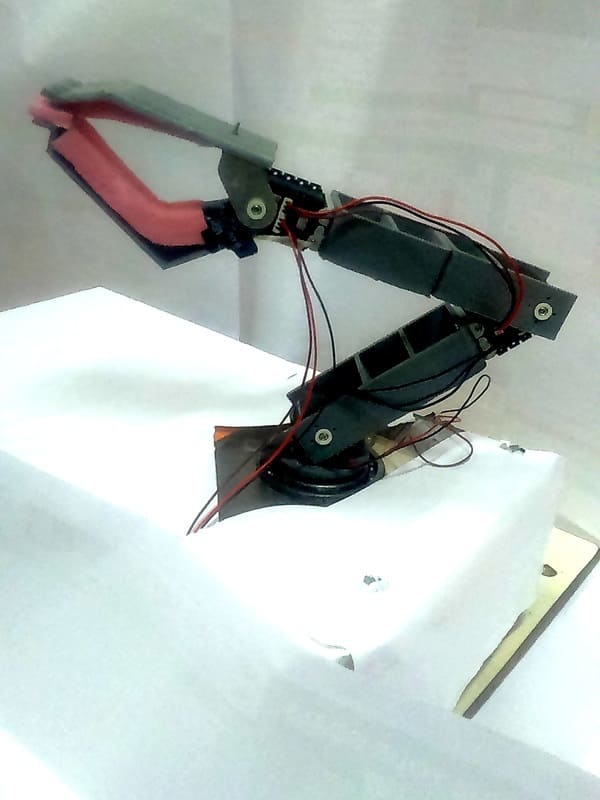
Robotic Arm is a 3 DOF arm, which can write any input given by the user . The input is given via keyboard .It is a type of mechanical arm, programmed, with similar functions to a human arm for writing and grabbing.The links of the manipulator are connected by joints allowing rotational motion which are in kinematic chain .
Insight
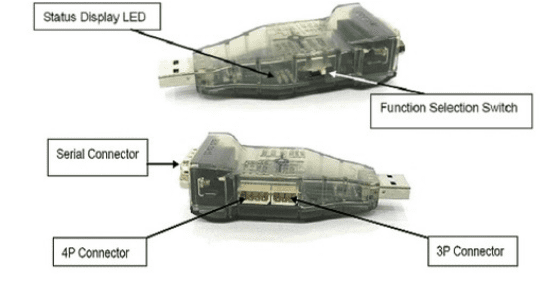
USB2Dynamixel is a device used to operate Dynamixel directly from PC. USB2Dynamixel is connected to USB port of PC.It is operated in the TTL mode.
Description :
Status Display LED : Display power supply, TXD(data writing), and RXD(data reading) status.
Function Selection Switch : Select the communication method of TTL, RS-485, and RS-232.
3P Connector : Connect Dynamixels of AX Series through TTL communication
4P Connector : Connect Dynamixels of DX, RX Series through RS-485 communication.
Serial Connector : Change from USB port to Serial port through RS-232 communication.


Actuators
The robotic arm is designed around the Dynamixel AX-12A robot actuators and driven by the software ROBOTIS . The Dynamixel servos can be connected in a daisy chain; it is a method of connecting device in a serial fashion, that is, connecting one device to another through the connected devices, and can control all the connected servos from one controller. Dynamixel servos communicate via RS485 or TTL. Dynamixel motors provide immense versatility due to position and direct torque control. Each motor is fully integrated with feedback functionality and programmability.
OpenCM 9.04
OpenCM9.04 is a microcontroller board based on 32bit ARM Cortex-M3. The OpenCM9.04’s schematics and source codes are open-source. ROBOTIS OpenCM is used to program OpenCM 9.04 . The operating voltage ranges between 5 to 12 volts and it has 26 GPIO pins. USB power is insufficient to run the dynamixels ; separate power supply needs to be provided.
MATLAB R2013
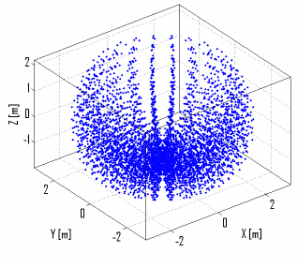
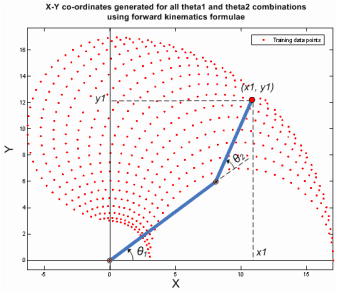
The link lengths were decided as per calculations done. The workspace for the arm was create using plot and surf functions in MATLAB.
The angle calculations were done with the help of MATLAB and simultaneously sent to OpenCM software.
Working Principle
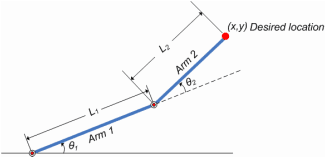
The robotic arm works on the principle of inverse kinematics.It helps us to calculate the joint angles, provided the desired location of the co-ordinate is known. Inverse kinematics transforms the motion plan into joint actuator trajectories for the robot. The Denavit – Hartenberg parameters are used to attach reference frames to links of the kinematic chain or robot manipulator
Features
- Light weight 3D printed arm links.
- Fully adjustable initial base angle.
- Full control over position (300 degrees), speed, and torque in 1024 increments.
Tech Specs
Actuators
- Motors Dynamixel AX-12A , MX-28A
- Weight 55 gm
- Stall Torque 15.3 kg-cm
- Angle of rotation 300 degree or continuous turn
- Size 32 x 50 x 40 mm
Link Lengths
Writing Arms
- Link 1 13.2 cm
- Link 2 13.3 cm
Grabbing Arm
- Link 1 26.5 cm
- Link 2 22 cm
Softwares
- MATLAB
- OpenCM9.04
- Roboplus
Power Supply
- 12V , 5A regulated power supply through SMPS.
Media
Team Members
Shalini Addepalli
Neha Pusalkar
Sakshi Kakde
Mritunjay Singh